
摘要:深圳众擎团队成功实现了全球首例人形机器人的前空翻动作,这一技术挑战与创新突破彰显了其在机器人领域的卓越实力。该成就不仅展示了人形机器人在动作灵活性方面的巨大进步,也标志着人工智能技术在动态控制领域的重大突破。
本文目录导读:
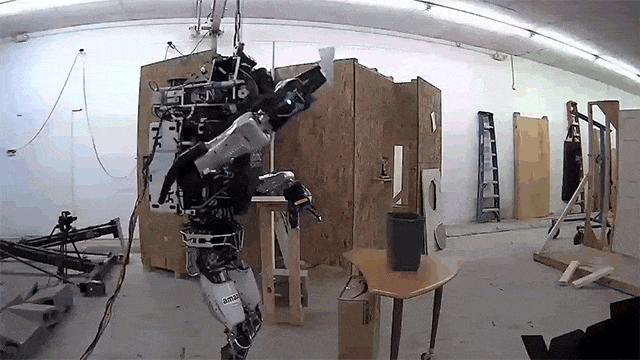
深圳众擎公司成功实现了全球首例人形机器人前空翻,这一重大突破在科技界引起了广泛的关注和热议,人形机器人前空翻是一项极具挑战性的技术难题,而这一操作的实现不仅展示了深圳众擎公司的技术实力,也标志着人形机器人技术的持续进步和发展。
深圳众擎的人形机器人前空翻成就
让我们回顾一下这一重大成就,人形机器人前空翻是一项高度复杂且极具挑战性的操作,要求机器人在动力学、平衡、控制等方面的技术达到极高水平,深圳众擎公司成功实现这一操作,无疑展示了其强大的技术研发能力和创新精神,这一成就对于人形机器人技术的发展具有里程碑意义,也为未来人形机器人在更多领域的应用提供了广阔的可能性。
实现人形机器人前空翻的技术难度
实现人形机器人前空翻到底有多难呢?这需要解决动力学和运动学的问题,前空翻过程中,机器人的每一个关节、每一个部位都需要精确协调,以实现流畅的动作,还需要解决平衡问题,人形机器人在进行前空翻时,需要保持极高的稳定性和平衡性,以防止摔倒或动作失误。
除此之外,还需要解决控制问题,为了实现精确的动作,需要先进的控制系统和算法来精确控制机器人的每一个关节和部位,还需要考虑机器人的硬件和软件的可靠性和耐用性,以确保在各种环境下都能稳定工作。
需要攻克的技术难题
为了实现人形机器人前空翻,需要攻克一系列技术难题,需要解决机器人的动力学和运动学问题,这需要深入研究机器人的运动规律和动力学特性,并建立精确的数学模型,还需要提高机器人的平衡能力,这可以通过改进机器人的传感器和控制系统来实现,以提高机器人的感知能力和反应速度。
还需要解决机器人的控制和协同问题,为了实现精确的动作和协同工作,需要建立高效的控制系统和算法,并优化机器人的硬件和软件设计,还需要解决机器人的感知和交互问题,这需要让机器人具备人类般的感知能力和交互能力,以便更好地适应各种环境和任务。
为了实现这些技术突破,深圳众擎公司可能采取了多种策略和方法,加大研发投入,吸引更多的人才加入研发团队;与高校和研究机构建立合作关系,共同开展研究和开发;借鉴人类的运动学和动力学原理,优化机器人的设计和控制算法;利用人工智能和机器学习技术,提高机器人的感知和决策能力。
深圳众擎实现全球首例人形机器人前空翻是一项重大的技术突破,也是人形机器人技术发展的一个重要里程碑,实现这一操作需要攻克一系列技术难题,包括动力学、运动学、平衡、控制、感知和交互等方面的问题,这一成就的取得离不开深圳众擎公司的技术创新和突破,也离不开整个科技界的共同努力和推动,随着技术的不断进步和发展,人形机器人在更多领域的应用将成为可能,为人类带来更多的便利和福祉。
 京ICP备11000001号
京ICP备11000001号